![]()

传 真: 021-62315435
邮 编: 200042
|
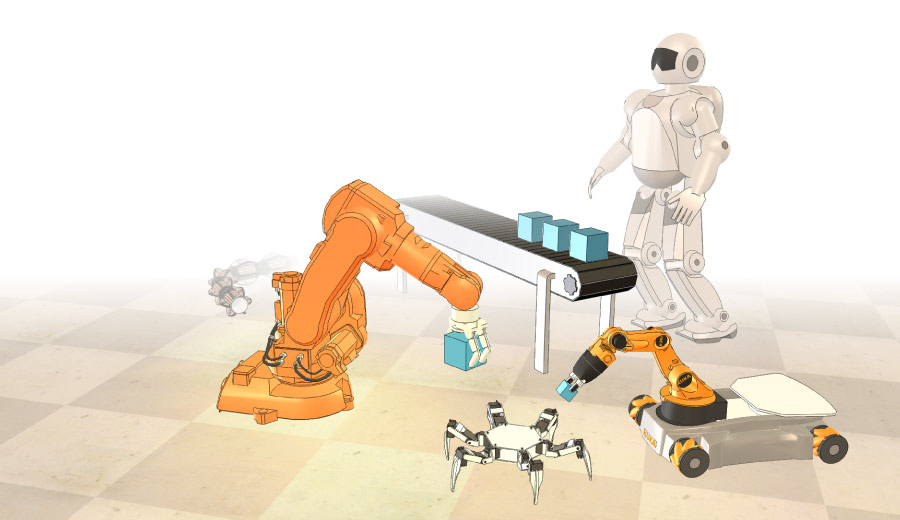
Introduction about V-REP Robot Simulation Software

V-REP is the Swiss army knife among robot simulators: you won't find a simulator with more functions, features, or more elaborate APIs.
The robot simulator V-REP, with integrated development environment, is based on a distributed control architecture: each object/model can be individually controlled via an embedded script, a plugin, a ROS node,a remote API client, or a custom solution. This makes V-REP very versatile and ideal for multi-robot applications. Controllers can be written in C/C++, Python, Java, Lua, Matlab, Octave or Urbi.
V-REP is used for fast algorithm development, factory automation simulations, fast prototyping and verification, robotics related education, remote monitoring, safety double-checking, etc.
Release 3.2.1 is out (May 4th 2015)
New features include:
- RRS-1 specification support
- Improved haptic device plugin
- OpenMesh plugin (with mesh decimation algorithm)
- Simplified plugin creation
- Many new API functions and models, etc.
European Robotics Forum (Vienna, March 11-13 2015)
Coppelia Robotics exhibited its robot simulator
Release 3.2.0 is out (February 3rd 2015)
New features include:
- Improved visual appearance
- Better support for Retina displays
- Velodyne HDL-64E S2 Lidar model
- Plugin for haptic device support
- Many new API functions and models, etc.
Release 3.1.3 is out (October 1st 2014)
New features include:
- Customization scripts
- Support for gear mechanisms
- Many new API functions and models
- Playback tool, faster vision sensors, etc.
IROS (Chicago, Sep. 14-18 2014)
Coppelia Robotics co-organized the tutorial on teaching robotics with a simulator
Autodesk IDEAS (San Francisco, June 25-26 2014)
Coppelia Robotics presented and participated in the
Autodesk IDEAS innovation and design series on robotics
Release 3.1.2 is out (June 16th 2014)
New features include:
- Many new robot models
- Improved motion planning functionality
- Many new API functions, faster remote API, etc.
Automatica (Munich, June 3-6 2014)
Coppelia Robotics exhibited the V-REP robot simulator
Release 3.1.1 is out (March 26th 2014)
New features include:
- Many new robot models
- Improved motion planning functionality
- Exhaustive motion planning documentation, etc.
Innorobo (Lyon, March 18-20 2014)
Coppelia Robotics exhibited its robot simulator
Autonomous Mobile Robots MOOC
(Feb 2014 - June 2014)
The ETH Zrich, in collaboration with Coppelia Robotics,
gives a Massive Open Online Course about autonomous mobile robots, hosted on edX.
The course is based on Matlab/Octave and the V-REP simulator, and can be accessed here.
Release 3.1.0 is out (January 20th 2014)
New features include:
- Improved stability and speed on all platforms
- Interface to Octave
- Support for ghost objects, headless mode, etc.
IROS/IREX (Tokyo, Nov. 4-9 2013)
Coppelia Robotics exhibited the V-REP robot simulator
We also had a talk about V-REP on Nov. 4th in the Simulation and Estimation session of IROS.
Release 3.0.5 is out (October 26th 2013)
New features include:
- Optional support for the Vortex engine
- Path planning for kinematic chains
- Newest Qt (V5.1.1), many new models, etc.
Release 3.0.4 is out (July 8th 2013)
New features include:
- Much faster laser scanner models
- Many new API functions
- Many new models, etc.
ICRA (Karlsruhe, May 7-9 2013)
Coppelia Robotics exhibited its robot simulator
We also participated in the workshop on development of simulation tools for robotics and biomechanics
Release 3.0.3 is out (April 29th 2013)
New features include:
- Improved remote API with multiple connections from a same client
- New mechanism for easy model re-instanciation (DNA transfer)
- New models (e.g. first NAO model), etc.
Innorobo (Lyon, March 19-21 2013)
Coppelia Robotics exhibited the V-REP simulator
Release 3.0.2 is out (March 14th 2013)
New features include:
- Support for low-level custom joint controllers
- Integrated Qhull library
- New models, etc.
Automation Schweiz (Jan. 23-24 2013)
Coppelia Robotics exhibited its simulator
Release 3.0.1 is out (Jan. 20th 2013)
New features include:
- Extensive support for convex meshes
- Integrated convex decomposition function
- Improved URDF importer
Release 3.0.0 is out (Jan. 10th 2013)
V-REP is now open source! -> Licensing conditions
Additional new features of this release include:
- Collada importer / exporter
- URDF importer
